
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 |
- Infotaxis
- ROS1
- 코드 트리 #개발자 #언어 공부 #코딩 공부
- 경로 계획
- dino #grounding dino #vlm #object detection
- planning #ste #논문 리뷰
- 자율주행 #로봇공학과
- Unity
- 개발 일기
- path planning #mcts
- 정보이론
- ROS2
- vision language model #transformer
- vlm 정리 #glip #object detection
- AirSim #RL #Drone
- 세계에서 이 세상이 사라진다 해도
- 책 #오늘 밤
- 소울러닝 #책리뷰 #느낀점
- ste
- 로봇 #로봇공학과 #공대생 #대학생 #일상 #휴무 #교수
- vlm #clip #object detection
- 탐색
- Today
- Total
퇴근할게요 교수님
로봇공학과를 선택한 이유, 자율주행 분야란? 본문
자율주행 분야란?
2024.01.18 - [일상 이야기] - 로봇공학과를 선택한 이유, 로봇공학과란?
을 이어서 이번엔 자율주행 분야에 대해서 말해보려고 합니다.

GPT와 같은 생성형 Ai와 함께 가장 핫한 주제 중 하나죠? 자율주행은 운전자가 직접 조작하지 않아도 주행환경을 인식해 위험을 판단하고 최적의 주행 경로를 계획해 스스로 주행하는 시스템을 말해요.
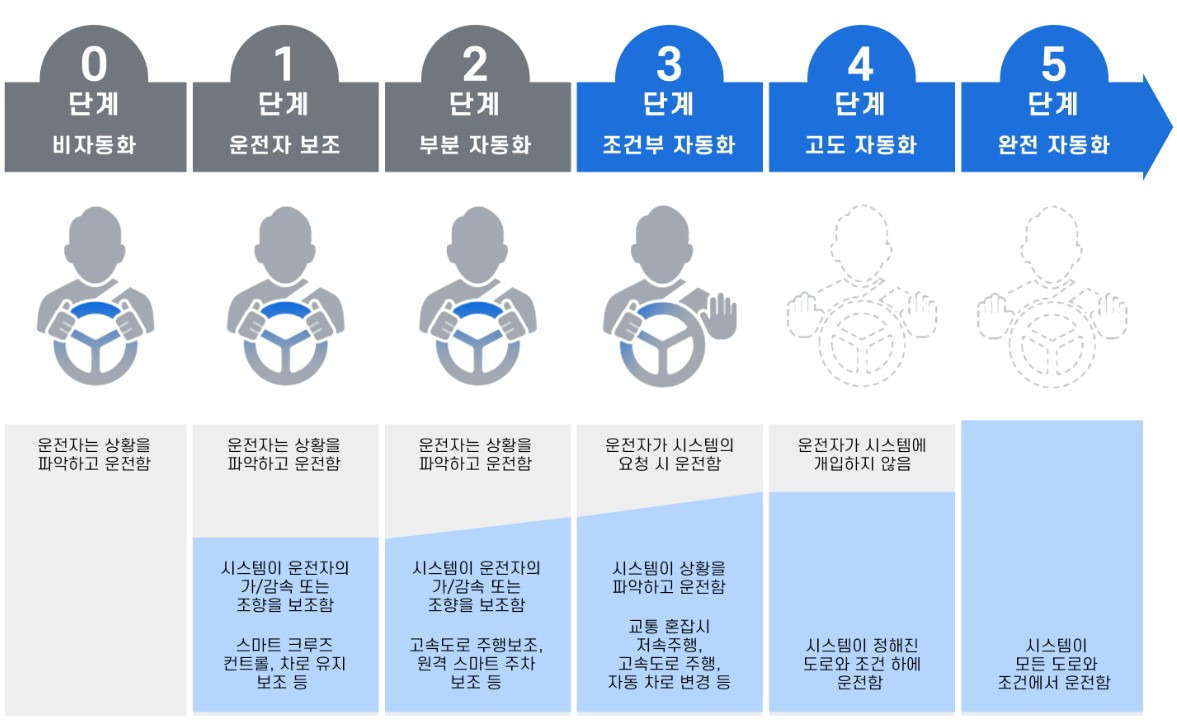
자율주행에는 5가지의 단계가 있는데요, 현재 자율주행 기술은 어느 정도까지 왔을까요? 테슬라의 FSD(Full Self-Driving), 구글 웨이모(Waymo), 그리고 여러 자동차 제조사들이 개발 중인 자율주행 시스템을 보면, 우리가 기대하는 완전한 자율주행(Level 5)까지는 아직 시간이 필요해요. 현재 가장 발전한 수준은 Level 3~4 정도로, 특정 환경에서는 운전자의 개입 없이 주행이 가능하지만, 모든 도로에서 완벽한 자율주행을 구현하기엔 아직 부족한 부분이 많아요. 특히 날씨, 도로 상태, 보행자의 돌발 행동 같은 변수들이 남아 있어 이를 해결해야 하는 문제점이 남아있어요.
아직 해결하기 위한 문제점은 많이 남아있지만, 사람이 운전하지 않고 편하게 쉬면서 목적지에 도착하는 자율주행 기술은 앞으로도 계속 필요한 기술이라고 생각해요. 그러면, 자율주행 소프트웨어 기술은 어떻게 나뉘어져 있을까요?
자율주행 분야는 어떻게 나뉘어 있을까?
경로 계획
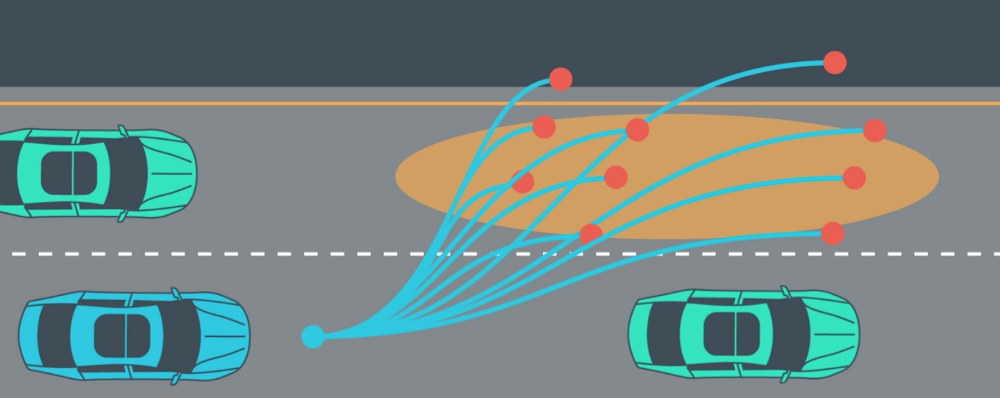
경로 계획(Path Planning)은 차량이 목적지까지 안전하고 효율적으로 이동할 수 있도록 최적의 경로를 찾는 기술이에요. 쉽게 말하면, “자동차가 길을 찾아가는 방법” 이라고 생각하면 돼요.
사람은 운전할 때 목적지를 정하고, 내비게이션을 보고 길을 선택해요. 자율주행 차량도 비슷하게 작동하지만, 사람이 조작하지 않고 스스로 길을 찾고 이동해야 하기 때문에 더 정교한 알고리즘이 필요해요.
- 전역 경로 계획(Global Path Planning)
- 지도(예를 들어, 내비게이션의 지도)를 기반으로 출발지에서 목적지까지 최적의 길을 찾는 과정이에요.
- 사람이 운전할 때 내비게이션이 추천해주는 고속도로 경로, 최단 거리 경로 같은 개념과 비슷해요.
- 지역 경로 계획(Local Path Planning)
- 주행 중 실시간으로 장애물(다른 차량, 보행자, 신호등과 같은)을 피하면서 안전한 주행 경로를 결정하는 과정이에요.
- 사람이 운전할 때도 갑자기 나타난 장애물을 피하거나 앞차와의 거리 조절을 하는 역할을 하는 거예요.
자율주행 차량은 이 두 가지 경로 계획을 함께 사용해서 스스로 목적지까지 안전하게 이동할 수 있어요.
SLAM
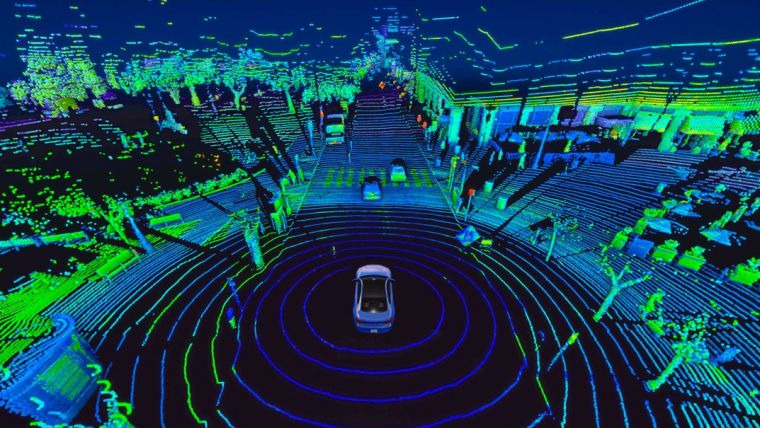
차량이 경로 계획을 하기 위해서는, 지도는 어떻게 생겼는 지와 같은 정보가 필요해요. SLAM(Simultaneous Localization and Mapping)은 자율주행 차량이 주변 환경의 지도(Map)를 만들면서 동시에 자신의 위치(Localization)를 추정하는 기술이에요.
자율주행 차량은 GPS, LiDAR, 카메라, IMU(관성 측정 장치) 같은 다양한 센서를 활용해 SLAM을 수행해요. GPS만으로는 실내나 터널 같은 환경에서 정확한 위치를 알기 어렵기 때문에, 센서 데이터를 융합해서 차량의 위치를 추정하는 것이 중요해요.
Object Detection
SLAM이 지도를 만들어주었다면, 객체 탐지(Object Detection)는 자율주행 차량이 주변 환경에서 차량, 보행자, 신호등, 표지판 등 다양한 물체를 인식하고 위치를 파악하는 기술이에요. 자율주행 차량이 안전하게 주행하려면 주변 상황을 정확하게 이해해야 하는데, 객체 탐지는 이를 가능하게 해주는 핵심 기술 중 하나예요.
객체 탐지는 전통적인 방법과 딥러닝 기반 방법 두 가지로 나뉘어요.
- 전통적인 방법: 특징점 검출(예: SIFT, HOG)과 머신러닝 기법(SVM 등)을 사용하여 객체를 분류
- 딥러닝 기반 방법: CNN(Convolutional Neural Network)을 활용하여 학습된 모델로 객체를 탐지
객체 탐지는 자율주행 차량이 주변 환경을 안전하게 인식하고 적절한 대응을 할 수 있도록 도와주는 필수적인 기술이에요.
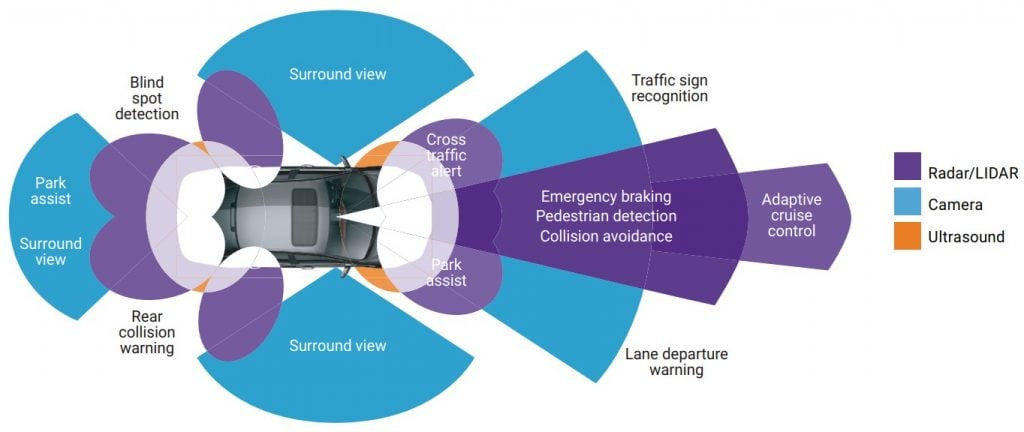
센서 융합(Sensor Fusion)
센서 융합은 자율주행 차량이 여러 가지 센서(LiDAR, 카메라, 레이더, GPS 등)에서 얻은 데이터를 결합하여 더 정확한 환경 정보를 생성하는 기술이에요. 각각의 센서는 장점과 단점이 있기 때문에, 하나의 센서만 사용하면 한계가 있어요. 그래서 여러 센서를 함께 활용해 보다 신뢰성 높은 데이터를 만드는 것이 중요해요.
각 센서가 가진 특성을 보면, 서로의 단점을 보완할 수 있다는 걸 알 수 있어요.
- LiDAR (Light Detection and Ranging)
- 장점: 3D 거리 정보가 정확함
- 단점: 악천후(비, 안개)에서 성능이 저하됨, 색상 인식 불가
- 카메라 (Camera)
- 장점: 색상, 문자(신호등, 표지판) 인식 가능
- 단점: 조명(어두운 환경)과 날씨에 영향을 많이 받음
- 레이더 (Radar)
- 장점: 악천후에서도 성능 유지, 속도 측정 가능
- 단점: 해상도가 낮아 정확한 객체 형태를 인식하기 어려움
- GPS & IMU (Global Positioning System & Inertial Measurement Unit)
- 장점: 차량의 위치와 이동 방향을 측정 가능
- 단점: GPS는 터널, 실내 등에서 신호가 약해질 수 있음
이처럼 각 센서가 보완할 수 있도록 데이터를 결합하는 것이 센서 융합의 핵심이에요.

제어(Control & Decision Making)
제어는 자율주행 차량이 경로 계획에 따라 안전하고 부드럽게 이동하도록 차량의 속도와 방향을 조절하는 기술이에요. 쉽게 말하면, "정해진 길을 따라 자동차가 자연스럽게 움직이게 만드는 과정"이라고 보면 돼요.
자율주행 차량이 단순히 목적지를 찾는 것만으로는 충분하지 않아요. 실제로 도로 위에서 부드럽고 안전하게 주행하려면 속도 조절, 차선 유지, 장애물 회피 같은 다양한 제어 기능이 필요해요.
자율주행에서 사용되는 대표적인 제어 기법은 다음과 같은 게 있어요.
- PID 제어 (Proportional-Integral-Derivative Control)
- 가장 기본적인 제어 방식으로, 현재 속도나 위치를 측정하고 오차를 줄이면서 조절하는 방식
- 자동차의 크루즈 컨트롤, 차선 유지 등에 사용됨
- Stanley Controller
- 구글 웨이모(Waymo)에서 처음 개발한 제어 알고리즘으로, 차량이 도로의 중앙선을 따라 주행할 수 있도록 함
- 차선 유지 및 고속도로 주행에 적합
- Pure Pursuit
- 차량이 앞쪽의 목표 지점을 따라가도록 유도하는 알고리즘
- 곡선 도로에서 안정적인 주행이 가능함
- MPC (Model Predictive Control)
- 미래의 차량 움직임을 예측하고 최적의 주행 경로를 선택하는 제어 방식
- 실시간으로 환경 변화에 대응할 수 있어, 자율주행에서 많이 활용됨
제어 기술은 자율주행 차량이 정해진 경로를 자연스럽고 안정적으로 주행할 수 있도록 만드는 핵심 요소예요.
간단하게 자율주행이 어떻게 이루어져 있는 지 알아봤어요!
자율주행은 현재 3단계에서 4단계에 머물러 있는 만큼 아직 가야할 길이 많이 남은 분야에요.
하지만, 반대로 우리가 할 수 있는 것들이 많이 남아있는 분야라고 생각해요. 저희가 만든 소프트웨어를 통해서사람이 운전하지 않고 편하게 움직이는 자동차를 만든다면 멋있지 않을까요?
'일상 이야기' 카테고리의 다른 글
| [책 中] 오늘 이 세상에서 사랑이 사라진다 해도 (0) | 2024.07.24 |
|---|---|
| 로봇공학과를 선택한 이유, 로봇공학과란? (2) | 2024.01.18 |

